移动码放机器人
系统简介
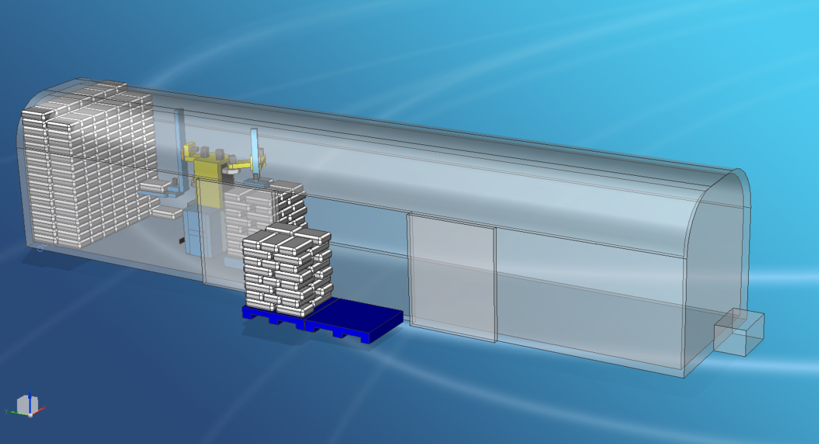
标准品-聚乙烯(后称:货物)-移动码放机器人采用拟人化码放方式,具有自动抓取码放货物、自动更换托盘、实时定位码放点、远程监管、多机协同作业、自动充电等功能,单机每小时可装载约400件货物,1台码放机器人可在6小时内装满一节车箱(按2400件一车箱计算),可根据场地需要配备多台设备联动作业。
工作效率
现场共计40节车厢,人工装卸时需要90人,平均6小时装满,按照每节车厢2400件计算,一个人每小时约装卸180件货物;一台码放机器人每小时约可装载400件,连续作业情况下,一台码放机器人可完成2个人的工作量,可根据实际业务需求增加码放机器人数量,提高工作效率,满足业务需要。
|
名称
|
效率
|
说明
|
|
抓取时间
|
3s/件
|
组成:机构移动时间t1=1s,吸盘抓起时间t2=0.5s,机构升降时间t3=1.5s
|
|
堆叠时间
|
5s/件
|
组成:机器人旋转时间t4=4s,托盘输送时间t5=1s
|
|
移动时间
|
1.2s/件
|
组成:小车移动时间t6=1s,插取定位时间t7=0.2s
|
|
总计
|
9.2
s/件
|
每小时约400件
|
系统组成
-
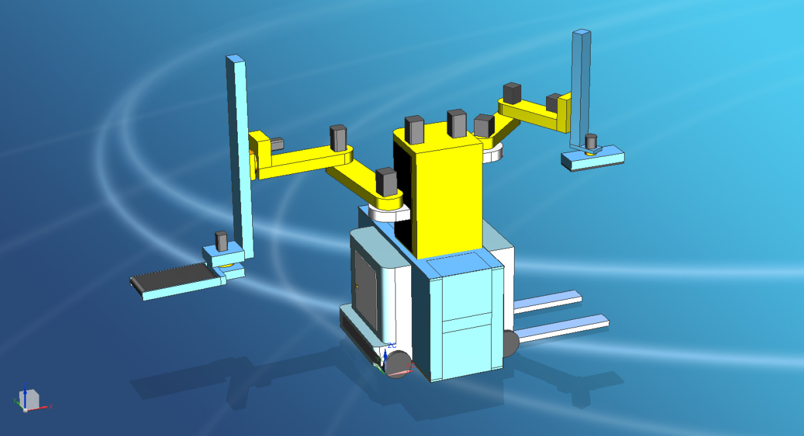
自动抓取码放:实时计算抓取、码放位置(移动机器人低位置传感会自动识别托盘叉车口的位置,此时叉车的识别移动速度为0.2m/s,耗时约6s(托盘摆放位置较规整的情况下);叉取好托盘后,移动机器人顶部传感同步识别托盘上货物的摆放中心位置和角度,识别过程和抓取过程重合,不会额外增加时间,抓取约2s一件货物),集成视觉错位校核检测,可快速定位抓取,将货物放置到机械手托架上,左右双手协同作业,机械手可自动升降作业,覆盖整车所有空间,无堆叠盲区(可以伸入机械手,对顶部进行堆放),满载高效,实现货物拟人装载。
-
自动更换托盘:自动巡航(移动机器人的轮子直径为200mm,地面一定量的凹凸面对整体移动没有影响,地面保护膜在不破损或较小破损情况下不会影响整体移动。)和托盘定位功能,当托盘上快没有货物时,系统控制机器人将空托盘放置站台缓存区,并从缓存区将满托盘自动搬运到所需位置,实现自动无人化作业,缓存区可根据装载情况设置多点。
-
实时定位码放点:初次码放时,机器人自动校准初始码放点(需要人为设定车厢号和工作的区域,定位点不需要人为设定,采用视觉激光自动扫描定位,根据视觉激光扫描数据实时更新码放点),并同步更新码放坐标系,装满设定区域后自动后退并开始装载下一区域,实时校核定位坐标一致性,确保码放准确性。
-
远程监管:码放后过程中,数据位置实时统计,可通过远程终端查看码放情况和设备运行情况。
-
多机协同作业:可根据一个车厢能可设置1-2台设备联动作业(需要人工设定左侧、中间或右侧进行堆放,只有一台设备作业时,需同时设定左侧,右侧和中间;两台以上设备作业时,单独设定左侧、中间或右侧,不能设定重复区域),车门中间位置时,可根据工作情况留下一台设备完成中间位置的码放,人工可操作机器人到到指定位置工作。
-
自动充电功能:设备自备电源,可连续工作6-8h,在检测到48V蓄电池电力消耗到设定最低点时,叉车通过既定程序进入充电过程,叉车通过雷达和视觉感应装置自主寻找充电桩进行充电。
-
便捷换电:为了保证设备持续稳定运行和应对突发断电情况,在设备内部配备便捷换电回路,可人工更换电池,实现无间断连续作业。



 沪公网安备 31010402009787号
沪公网安备 31010402009787号